Vine Robot Localization Via Collision
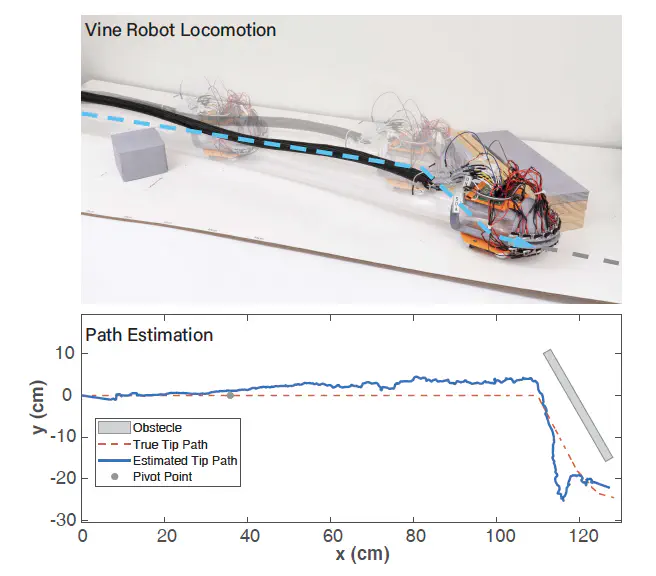 Visualization of the Vine Robot localization method.
Visualization of the Vine Robot localization method.Abstract
Localization is critical for robots performing tasks in unstructured environments, yet traditional methods struggle with occlusions and sensor limitations. This paper introduces a novel localization strategy for Vine Robots, leveraging contact-based sensing to estimate the tip position via collision detection. Single- and multi-obstacle experiments demonstrated less than 5% error relative to the robot’s length, establishing the approach as a robust method for soft robot localization.
Type
Publication
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)