Eugenio Frias-Miranda
Eugenio Frias-Miranda
Home
Projects
Gallery
Publications
Contact
Light
Dark
Automatic
Soft Robotics
Adaptation and Training Effects from a Passive Wearable Resistance Device During Exercise
A Wearable Resistance Devices Motor Learning Effects in Exercise
PDF
Video
Follow
Anisotropic Stiffness and Programmable Actuation for Soft Robots Enabled by an Inflated Rotational Joint
Soft robots are highly adaptable for tasks requiring compliance and distributed actuation. This paper presents an inflatable actuation …
Sicheng Wang
,
Eugenio Frias-Miranda
,
Antonio Alvarez Valdivia
,
Laura H. Blumenschein
Cite
DOI
Read on arXiv
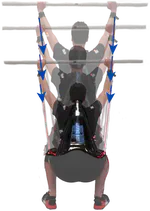
Adaptation and Training Effects from a Passive, Wearable Resistance Device During Exercise
Wearable technology’s integration into exercise regimens has enhanced human motor capabilities and rehabilitation. This study …
Eugenio Frias-Miranda
,
Hong-Anh A. Nguyen
,
Jeremy Hampton
,
Trenner A. Jones
,
Benjamin Spotts
,
Matthew Cochran
,
Deva D. Chan
,
Laura H. Blumenschein
Cite
Publication on IEEE Xplore
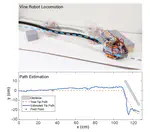
Vine Robot Localization Via Collision
Localization is critical for robots performing tasks in unstructured environments, yet traditional methods struggle with occlusions and …
Eugenio Frias-Miranda
,
Alankriti Srivastava
,
Sicheng Wang
,
Laura H. Blumenschein
Cite
DOI
Read on IEEE Xplore
Localization of Vine Robot Through Obstacle Collision
We predict the tip position of a vine robot at every instant, using collisions to our advantage
Video
Follow
Cite
×