Eugenio Frias-Miranda
Eugenio Frias-Miranda
Home
Projects
Gallery
Publications
Contact
Light
Dark
Automatic
localization
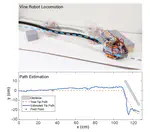
Vine Robot Localization Via Collision
Localization is critical for robots performing tasks in unstructured environments, yet traditional methods struggle with occlusions and …
Eugenio Frias-Miranda
,
Alankriti Srivastava
,
Sicheng Wang
,
Laura H. Blumenschein
Cite
DOI
Read on IEEE Xplore
Cite
×