Anisotropic Stiffness and Programmable Actuation for Soft Robots Enabled by an Inflated Rotational Joint
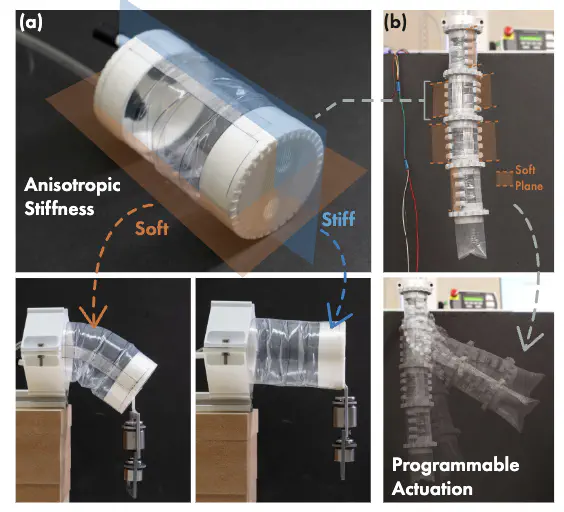 Conceptual design of the inflated rotational joint.
Conceptual design of the inflated rotational joint.Abstract
Soft robots are highly adaptable for tasks requiring compliance and distributed actuation. This paper presents an inflatable actuation module with a defined bending plane and anisotropic stiffness enabled by forced partial wrinkling. By adjusting the ratio of wrinkled to unwrinkled regions, the module achieves tunable stiffness, enabling controlled kinematics and actuation sequences. Experiments confirm the efficacy of this approach in decoupling actuation efficiency from load capacity, providing a novel pathway for embedding intelligent actuation into soft robots.
Type
Publication
arXiv preprint arXiv:2410.13003